Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 22 março 2025

Chapter 2
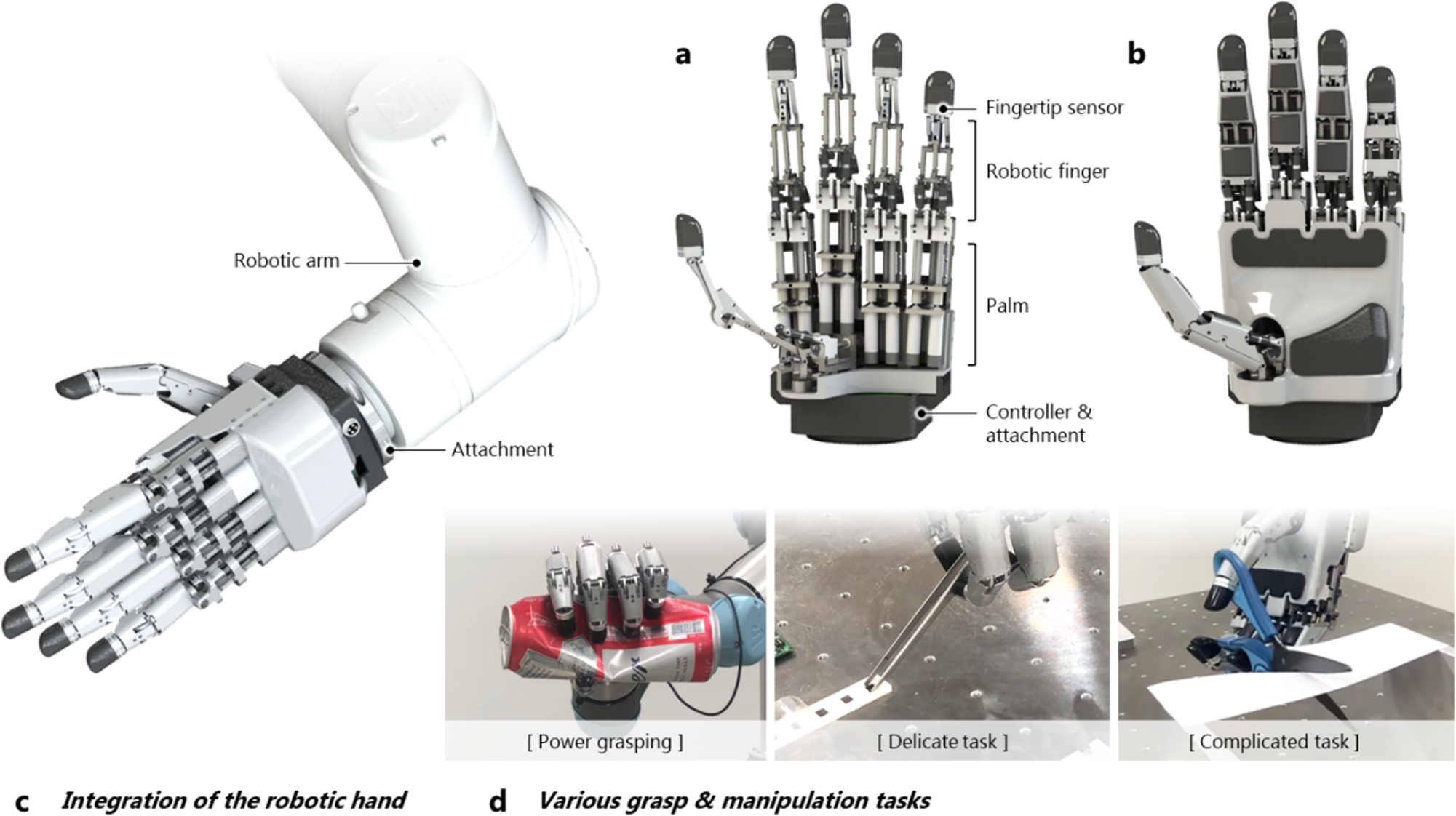
Integrated linkage-driven dexterous anthropomorphic robotic hand
Frontiers An Adaptive Actuation Mechanism for Anthropomorphic Robot Hands
Geometry and kinematics for a spherical-base integrated parallel mechanism – topic of research paper in Mechanical engineering. Download scholarly article PDF and read for free on CyberLeninka open science hub.

Full article: Characteristic analysis and motion control of a novel ball double-screw hydraulic robot joint

Design and transmission analysis of an asymmetrical spherical parallel manipulator - ScienceDirect

What are manipulator robots? Understanding their Design, Types, and Applications
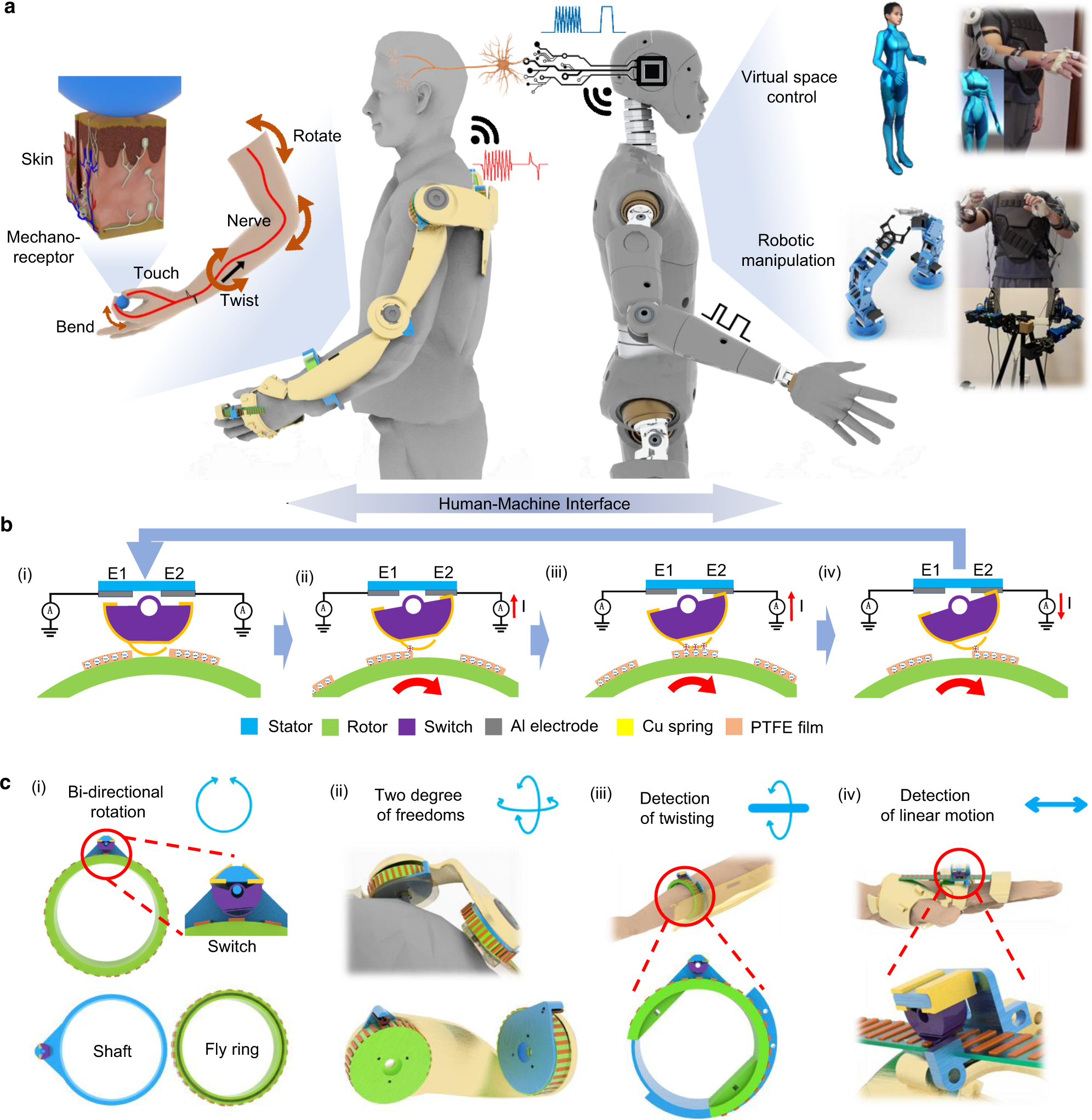
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system

Workspace characterization and kinematic analysis of general spherical parallel manipulators revisited via graphical based approaches - ScienceDirect

Comparison of 3-DOF asymmetrical spherical parallel manipulators with respect to motion/force transmission and stiffness - ScienceDirect

Kinematic model of a spherical parallel manipulator: (a) general model;

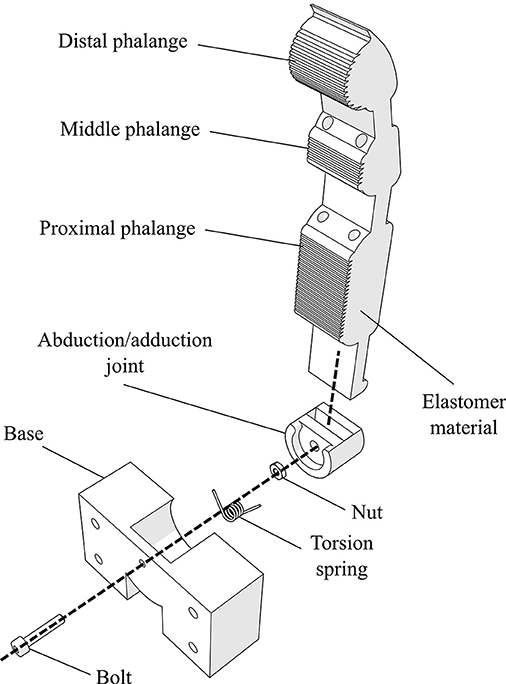
Design of the reconfigurable joint.
Recomendado para você
-
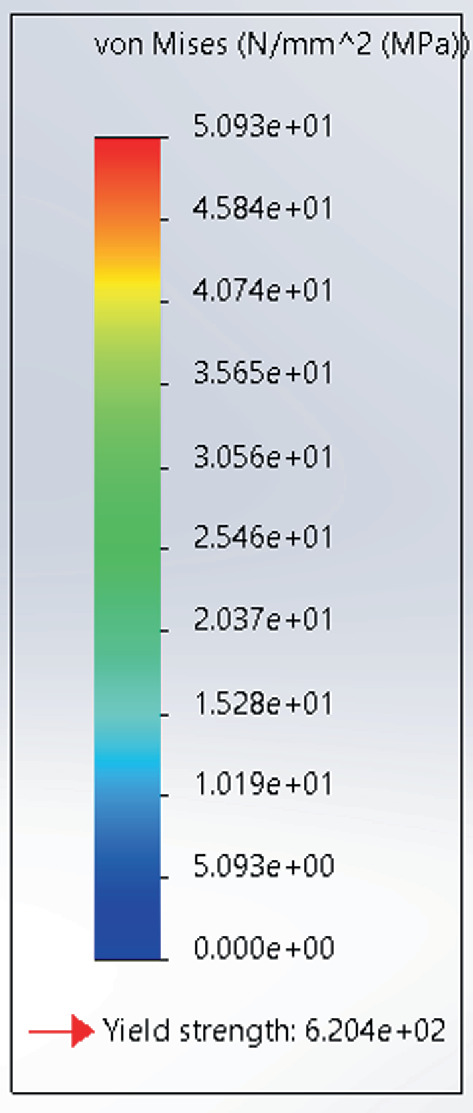
 Strength properties (N/mm 2 ), elastic modulus (N/mm 2 ) and density22 março 2025
Strength properties (N/mm 2 ), elastic modulus (N/mm 2 ) and density22 março 2025 -
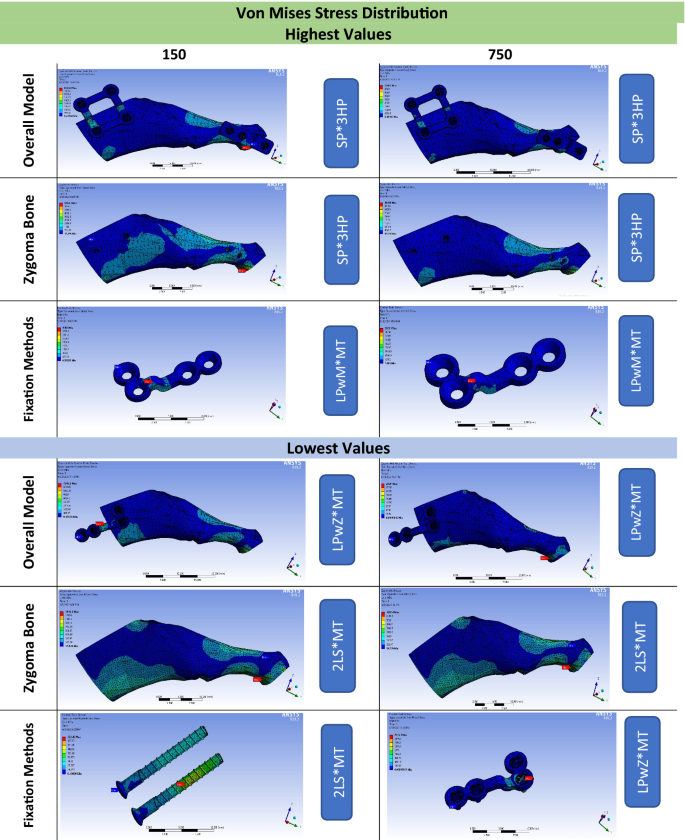 Stability of different fixation methods after reduction malarplasty under average and maximum masticatory forces: a finite element analysis, BioMedical Engineering OnLine22 março 2025
Stability of different fixation methods after reduction malarplasty under average and maximum masticatory forces: a finite element analysis, BioMedical Engineering OnLine22 março 2025 -
![Yield strength R<sub>eL</sub> [N/mm<sup>2</sup>]](https://media.bossard.com/-/media/bossard-group/website/images/engineering/technical-resources-new/en/yield-strength-rel.png?la=en&hash=9EADA9879B83AE1161618F22BA9D7BBF) Yield strength ReL [N/mm2]22 março 2025
Yield strength ReL [N/mm2]22 março 2025 -
2019 SolidWorks - Assessing Stress Hot Spots22 março 2025
-
 Full article: Moisture and short-term time-dependent behavior of Norway spruce clear wood under compression perpendicular to the grain and rolling shear22 março 2025
Full article: Moisture and short-term time-dependent behavior of Norway spruce clear wood under compression perpendicular to the grain and rolling shear22 março 2025 -
 Fitness-for-Service - Acuren22 março 2025
Fitness-for-Service - Acuren22 março 2025 -
 A beam of L meters span simply supported at end carries a central load W. The overall depth of beam section is 300 mm with horizontal flanges each of 200 mm x22 março 2025
A beam of L meters span simply supported at end carries a central load W. The overall depth of beam section is 300 mm with horizontal flanges each of 200 mm x22 março 2025 -
 Materials Dlubal Software22 março 2025
Materials Dlubal Software22 março 2025 -
 Sterling Seal and Supply (STCC) TF1863.01512X12 Tan with Green Tint TerMica Teadit Extreme Heat Resistant Mica, 1/64 Thick, Sheet Size 12 x 12: : Industrial & Scientific22 março 2025
Sterling Seal and Supply (STCC) TF1863.01512X12 Tan with Green Tint TerMica Teadit Extreme Heat Resistant Mica, 1/64 Thick, Sheet Size 12 x 12: : Industrial & Scientific22 março 2025 -
 Brochure Design Services, Brochure Designing Company22 março 2025
Brochure Design Services, Brochure Designing Company22 março 2025
você pode gostar
-
 How to find out when a website was created: popular tools22 março 2025
How to find out when a website was created: popular tools22 março 2025 -
 Luz and Eda the Owl House22 março 2025
Luz and Eda the Owl House22 março 2025 -
 Minecraft: PlayStation 4 Edition - Fan Favorites Pack (201522 março 2025
Minecraft: PlayStation 4 Edition - Fan Favorites Pack (201522 março 2025 -
 Top 3 Gaming Logo Maker Application for Free fair, by Abdul Malik22 março 2025
Top 3 Gaming Logo Maker Application for Free fair, by Abdul Malik22 março 2025 -
 Jogo Calota Centro Roda Parati Club Roda Coquinho Vw Relevo22 março 2025
Jogo Calota Centro Roda Parati Club Roda Coquinho Vw Relevo22 março 2025 -
 family guy online : r/familyguy22 março 2025
family guy online : r/familyguy22 março 2025 -
 High&Low: The Worst X (2022) - MyDramaList22 março 2025
High&Low: The Worst X (2022) - MyDramaList22 março 2025 -
synapse x vs script ware|TikTok Search22 março 2025
-
 Aplicação Queen Dourado - LeFruFru22 março 2025
Aplicação Queen Dourado - LeFruFru22 março 2025 -
 Power Wash Simulator : Free Download, Borrow, and Streaming22 março 2025
Power Wash Simulator : Free Download, Borrow, and Streaming22 março 2025
