Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 28 março 2025

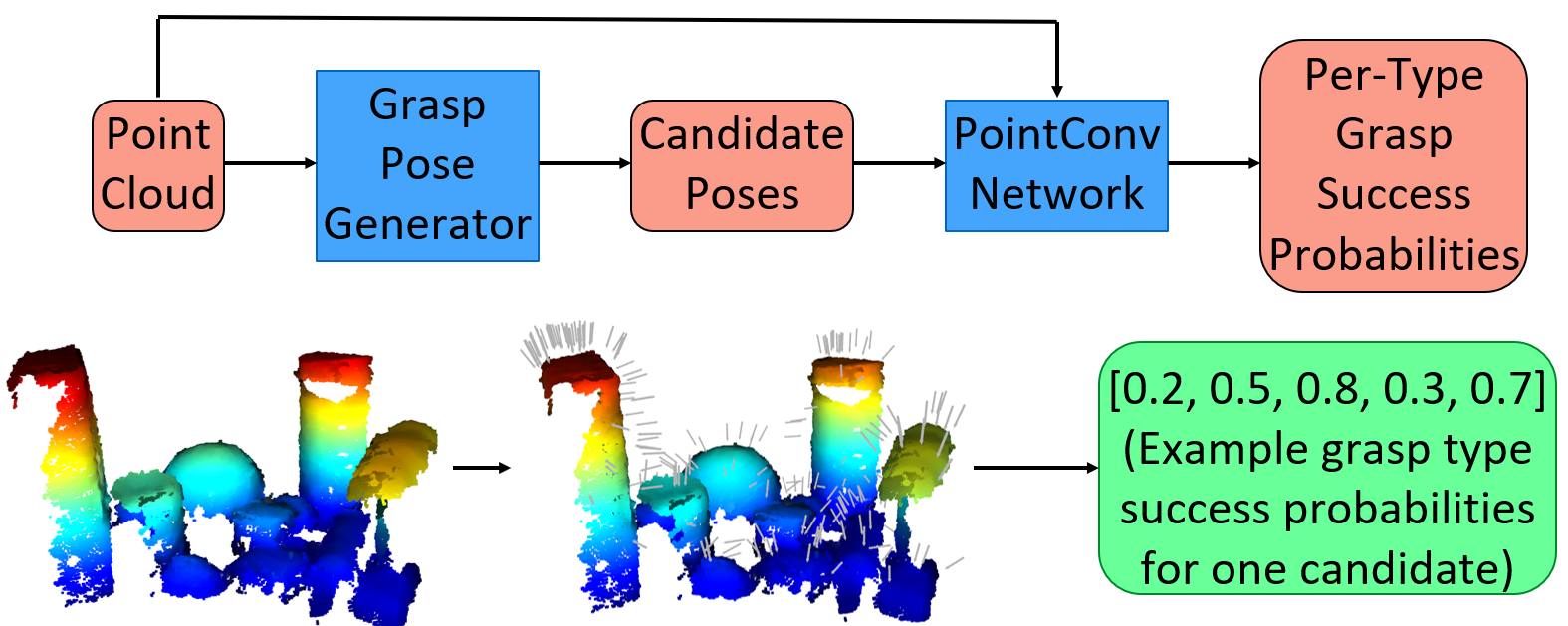
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
During training, the encoder maps each grasp to a point z in a

HGG-CNN: The Generation of the Optimal Robotic Grasp Pose Based on

Dex-Net 2.0 Architecture. (Center) The Grasp Quality Convolutional
Research Dr. Miao Li

Sensors, Free Full-Text
Learning to Detect Multi-Modal Grasps for Dexterous Grasping in
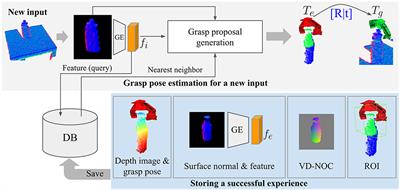
6-DoF grasp pose estimation based on instance reconstruction

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
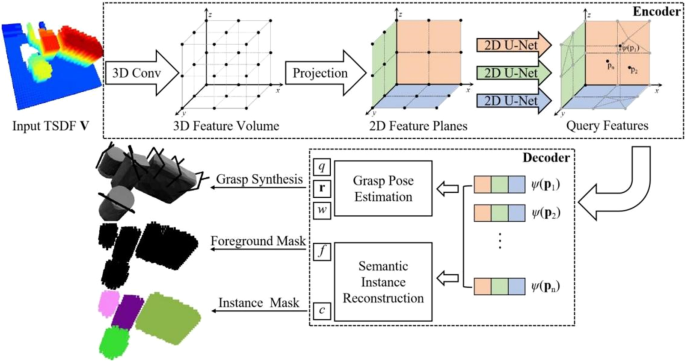
6-DoF grasp pose estimation based on instance reconstruction
Frontiers DGCM-Net: Dense Geometrical Correspondence Matching
Recomendado para você
-
Se Candidate Mulher28 março 2025
-
 Candidate-se às vagas da Fundação Mudes de qualquer lugar28 março 2025
Candidate-se às vagas da Fundação Mudes de qualquer lugar28 março 2025 -
Candidate-se! Mercado Livre abre mais de 7 mil vagas de trabalho28 março 2025
-
 S.E. Cupp: What's the point of debates anymore?28 março 2025
S.E. Cupp: What's the point of debates anymore?28 março 2025 -
Candidate-se já na vaga de Técnico de Recursos Humanos no nosso28 março 2025
-
 Se Candidate Mulher' oferece 1.000 vagas em cursos gratuitos e28 março 2025
Se Candidate Mulher' oferece 1.000 vagas em cursos gratuitos e28 março 2025 -
 Candidate-se para participar de um estudo clínico28 março 2025
Candidate-se para participar de um estudo clínico28 março 2025 -
 Candidate-se agora ao formulário de informações sobre o conceito de trabalho28 março 2025
Candidate-se agora ao formulário de informações sobre o conceito de trabalho28 março 2025 -
 Video: SE Cupp: The Republican candidates who need to drop out immediately28 março 2025
Video: SE Cupp: The Republican candidates who need to drop out immediately28 março 2025 -
 Oportunidades abertas para Projetos de Compensação Ambiental – IABS, o Instituto Brasileiro de Desenvolvimento e Sustentabilidade28 março 2025
Oportunidades abertas para Projetos de Compensação Ambiental – IABS, o Instituto Brasileiro de Desenvolvimento e Sustentabilidade28 março 2025


você pode gostar
-
 Pokemon Scarlet & Violet - How to Get Mew & Mewtwo28 março 2025
Pokemon Scarlet & Violet - How to Get Mew & Mewtwo28 março 2025 -
 League of legends 114 champions by lcomicer on DeviantArt28 março 2025
League of legends 114 champions by lcomicer on DeviantArt28 março 2025 -
Tesouro de Exemplos I PDF, PDF, Eucaristia28 março 2025
-
 Comprar Carros 3: Correndo para Vencer - Ps5 Mídia Digital - R$29,90 - Ato Games - Os Melhores Jogos com o Melhor Preço28 março 2025
Comprar Carros 3: Correndo para Vencer - Ps5 Mídia Digital - R$29,90 - Ato Games - Os Melhores Jogos com o Melhor Preço28 março 2025 -
 Watch Ping Pong (Original Japanese Version) Season 1 (English28 março 2025
Watch Ping Pong (Original Japanese Version) Season 1 (English28 março 2025 -
 Olympedia – Mark Scanlon28 março 2025
Olympedia – Mark Scanlon28 março 2025 -
 Lord of the Rings Gollum and Smeagol 1:4 Scale Figures28 março 2025
Lord of the Rings Gollum and Smeagol 1:4 Scale Figures28 março 2025 -
 Minecraft 1.20 Official Version Released, Minecraft 1.20 Latest Update28 março 2025
Minecraft 1.20 Official Version Released, Minecraft 1.20 Latest Update28 março 2025 -
 Toca Boca Dress Up Game - Play Online28 março 2025
Toca Boca Dress Up Game - Play Online28 março 2025 -
 Os Cavaleiros Do Zodíaco Ômega 1ª Temporada Ep.2128 março 2025
Os Cavaleiros Do Zodíaco Ômega 1ª Temporada Ep.2128 março 2025